ٜԉѬᅺӻ�ɓ�8.45
ૅᔷ rotation
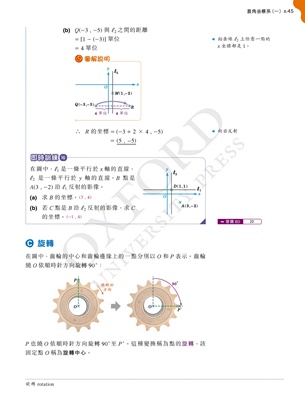
(b) Q(-3 , -5) ၾ l2 ʘගٙ൷ᕎ
= [1 - (-3)] ఊЗ
= 4 ఊЗ
圖解說明 M(1,-2)
y
x
m2
O
Q(-3,-5)
R
4 單位 4 單位
` R ٙѬᅺ = (-3 + 2 # 4 , -5)
= (, )55དۧᇞ
l2 ɪจɓᓃٙ
x Ѭᅺே݊ 1�
◀ Σ̛ˀ࢛
◀
C 旋轉
ίྡʕ�ቃٙʕːձቃᗙᇝɪٙɓᓃʱй˸ O ձ P ڌͪ�ቃ
ᔎ O Աනࣛ০˙Σૅᔷ 90c�
O
P
O
90°
P'
順時針
方向
P ɰᔎ O Աනࣛ০˙Σૅᔷ 90cЇ Pl�வ၇ᜊ౬၈މᓃٙૅᔷ�༈
ո֛ᓃ O ၈މૅᔷʕː�
ίྡʕ�l1 ݊ɓૢ̻Б x ൿٜٙᇞ�
l2 ݊ɓૢ̻Б y ൿٜٙᇞ�B ᓃ݊
A(3 , -2) ض l1 ˀ࢛ٙᅂ྅�
(a) Ӌ B ٙѬᅺ�
(b) ߰ C ᓃ݊ B ض l2 ˀ࢛ٙᅂ྅�Ӌ C
ٙѬᅺ�
16
即時訓練即時訓練
➥ ୦ᕚ 8D 20
A(3 ,- 2)
D(1,1)
y
x
m2
m1
O
(3 , 4)
(-1 , 4)